

ロボバイオ エクス:ブログ
IKサンプル ソース
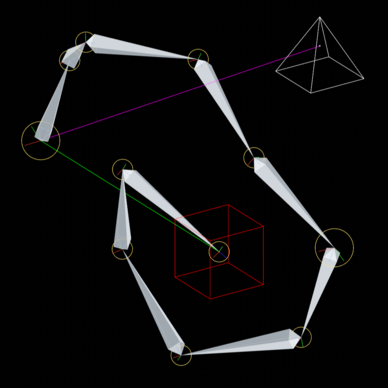
本サイトの Gallery/Development Status/RealNoids に 二種類のIKソルバのサンプル ソース を掲載しました。一つはポール(左又は上にあるCGのマジェンタの直線)と先端のジョイントを含む平面に投影した仮想ジョイントを使用してIKを解くソルバ(=2Dソルバ)、もう一つはダイレクトにIKを解くソルバ(=3Dソルバ)です。両方のソルバで、FK成分との合成や角度制限を適用することが可能です。(2Dソルバはバインド状態を0度とする平面上の角度指定になります。)
ヒューマノイドの実現性を探る為に行った調査で、一番最初に取り掛かったのがIKプログラムのプロトタイプ作成でした。「運動とは位置又は姿勢、又はその両方が変化すること。」だとすると、人の能動的な運動には必ず体の姿勢の変化が伴う。ある姿勢から別の姿勢に変化させるには、「ある姿勢と別の姿勢はどんな姿勢?」を解決する必要がある。と考えた訳です。色々な考え方があるので、一概には言えませんが、ヒューマノイドを人として存在させるための鍵となる要素の一つがIKではないか?と思っています。(答えが無限にありますしね。)