
リアルノイド オリジン


「オリジン」とは
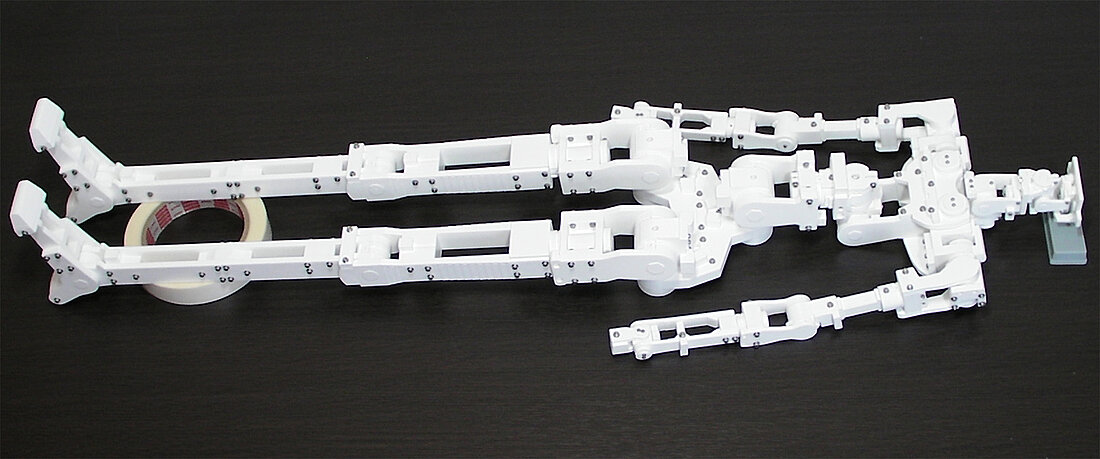
オリジンは生命力と日本の心を有するロボットの祖先となる最初のロボットです。このページのバナーと上にある画像はハーフ サイズ プロトタイプ「零」のフレームで、身長約81cm、36+10の自由度(手首より先を除く)を有しています。(バナー画像は3Dプリンターで出力した実機です。)オリジンの最新の設計は、このプロトタイプ「零」の問題点を修正して、全体のサイズを倍(体積は8倍)にしたものです。
体格
番号 | 項目 | 規格 | 単位 | |
和名 | 英名 | |||
1 | 体重 | Weight | 36.8 | kg |
2 | 身長 | Height | 162.0 | cm |
3 | 頚椎高 | Cervicale height | 139.5 | cm |
5 | 肩峰高 | Acromiale height | 136.7 | cm |
8 | 乳頭高 | Bust height | 123.6 | cm |
9 | UB高 | Under Bust height | 115.8 | cm |
10 | 最小胴囲高 | Height of waist circumference | 108.0 | cm |
11 | 後ウエスト高 | Waist belt height, posterior | 106.7 | cm |
12 | 横ウエスト高 | Waist belt height, side | 106.0 | cm |
13 | 前ウエスト高 | Waist belt height, anterior | 105.5 | cm |
15 | 腸骨稜点高 | Iliocristale height | 101.8 | cm |
16 | 転子外突高 | Trochanterion laterale height | 88.7 | cm |
17 | 殿突高 | Buttock height | 93.3 | cm |
18 | 殿溝高 | Gluteal furrow height | 85.0 | cm |
19 | 股下高 | Crotch height | 83.2 | cm |
20 | 大腿最大囲高 | Height of thigh circumference | 80.2 | cm |
21 | 膝蓋骨中央高 | Mid-patellar height | 50.0 | cm |
22 | 下腿最大囲高 | Height of calf circumference | 35.7 | cm |
番号 | 項目 | 規格 | 単位 | |
和名 | 英名 | |||
23 | 上肢長 | Upper limb length | 64.8 | cm |
24 | 上腕長 | Upper arm length | 25.6 | cm |
25 | 前腕長 | Forearm length | 22.7 | cm |
26 | 頚付根幅 | Neck root breadth | 11.0 | cm |
27 | 前腋窩幅 | Inter anterior axills breadth | 27.0 | cm |
28 | 後腋窩幅 | Inter posterior axills breadth | 29.8 | cm |
番号 | 項目 | 規格 | 単位 | |
和名 | 英名 | |||
29 | 胸部横径 | Chest breadth | 26.1 | cm |
30 | 下胸部横径 | Lower chest breadth | 22.6 | cm |
31 | 最小胴囲幅 | Waist breadth | 19.4 | cm |
32 | 横ウエスト幅 | Waist breadth | 21.9 | cm |
33 | 腹部突出点位横径 | Abdominal extension breadth | 27.1 | cm |
34 | 臀突位横径 | Hip breadth at buttock protrusion | 32.4 | cm |
35 | 大転子間幅 | Bitrochanteric breadth | 33.3 | cm |
36 | 殿幅 | Hip breadth | 34.2 | cm |
37 | 大腿囲位置横径 | Thigh breadth | 16.0 | cm |
38 | 膝幅 | Knee breadth | 8.8 | cm |
39 | 下腿最大幅 | Maximum lower leg breadth | 8.8 | cm |
40 | 下腿最小幅 | Minimum lower leg breadth | 4.5 | cm |
番号 | 項目 | 規格 | 単位 | |
和名 | 英名 | |||
48 | 前後腋窩厚 (腕付根線の最大前後径) | Scye depth | 9.7 | cm |
49 | 腕付け根の厚さ (前腋窩のレベルにおける水平前後径) | Scye depth at anterior axilla point | 9.8 | cm |
41 | 胸部厚径 | Chest depth | 21.4 | cm |
42 | UB位置厚径 | Chest depth at under bust | 17.6 | cm |
44 | 胴部厚径 | Waist depth | 14.9 | cm |
43 | 横ウエスト厚 | Waist depth (waist belt) | 15.4 | cm |
45 | 腹部厚径(最前方突出位) | Abdominal extension depth | 17.2 | cm |
46 | 殿部厚径(転子外突点位) | Buttock depth at great trochanter | 18.9 | cm |
47 | 殿部厚径(殿突位) | Buttock depth | 19.1 | cm |
50 | 大腿最大囲位置厚径 | Thigh depth | 15.8 | cm |
51 | 膝蓋中央点位置厚径 | Knee depth | 10.3 | cm |
52 | 下腿最大囲位置厚径 | Maximum lower leg depth | 10.2 | cm |
53 | 下腿最小囲位置厚径 | Minimum lower leg depth | 6.4 | cm |
番号 | 項目 | 規格 | 単位 | |
和名 | 英名 | |||
#80 | 手幅 | Hand thickness | 7.2 | cm |
#81 | 手長(手首の皺から) | Hand length from crease | 16.5 | cm |
#83 | 手厚 | Hand thickness | 2.5 | cm |
番号 | 項目 | 規格 | 単位 | |
和名 | 英名 | |||
#77 | 足長(間接) | Foot length | 24.0 | cm |
#86 | 内不踏長(間接) | Instep length | 17.0 | cm |
#74 | 外不踏長(間接) | Fibular instep length | 17.0 | cm |
#68 | ボール幅(間接) | Ball breadth | 8.5 | cm |
#75 | 足幅、斜(間接) | Foot breadth | - | cm |
#84 | 踵幅(間接) | Heel breadth | 6.8 | cm |
#90 | 内果高 | Medial malleolus height | 6.9 | cm |
#88 | 外果高 | Lateral malleolus height | 6.9 | cm |
#96 | 第1指側角度 | Toe I angle | 10.0 | 度 |
#87 | 第5指側角度 | Toe V angle | 10.0 | 度 |
材質
項目 | 材料 |
骨格 | ABS樹脂(塗装/メッキの可能性あり、ポリカーボネートの可能性あり)/アルミニウム(補強用) |
各種ステー | ABS樹脂/アルミニウム(ステンレスの可能性あり) |
駆動部 | プロジェクト完了まで非公開 |
外装 | ABS樹脂(塗装/メッキの可能性あり) |
ボルト/ワッシャー/ナット | ステンレス |
駆動系
部位区分 総自由度 (36+10) | 部位 | 駆動範囲 (度) | 方式 | 最終出力 | ||
最大 トルク Nm | 最大 回転数 rpm | |||||
頸部 自由度6 | 頭 | H | 左右側屈:±25.0 | [1] | 2.99 | 10.61 |
P | 前屈:25.0 後屈:35.0 | [1] | 2.99 | 10.61 | ||
B | 左右回旋:±30.0 | [1] | 2.06 | 10.61 | ||
首 | H | 左右側屈:±50.0 | [1] | 4.74 | 10.61 | |
P | 前屈:40.0 後屈:30.0 | [1] | 4.74 | 10.61 | ||
B | 左右回旋:±35.0 | [1] | 2.06 | 10.61 | ||
腕部 自由度9 | 肩内側 | H | 前方:26.0 後方:17.0 | 0.0度で固定 | - | - |
P | 上方:50.0 下方:2.0 | 0.0度で固定 | - | - | ||
肩外側 | H | 前方拳上:140.0 後方拳上:80.0 | [1] | 17.54 | 42.06 | |
P | 外転:140.0 内転:30.0 | [1] | 17.54 | 42.06 | ||
B | 外旋:80.0 内旋:95.0 | [1] | 8.76 | 25.71 | ||
肘 | H | 屈曲:140.0 伸展:5.0 | [1] | 6.70 | 25.71 | |
B | 外内旋回:±90.0 | [1] | 3.02 | 53.05 | ||
手首 | H | 背屈:80.0 掌屈:70.0 | [1] | 0.79 | 32.15 | |
P | 撓屈:20.0 尺屈:20.0 | [1] | 0.79 | 32.15 | ||
胴部 自由度6 | 胸 | H | 左右側屈:±25.0 | [1] | 16.43 | 37.89 |
P | 前後屈曲:±35.0 | [1] | 38.89 | 37.89 | ||
B | 左右回旋:±15.0 | 0.0度で固定 | - | - | ||
腰 | H | 左右側屈:±40.0 | [1] | 86.19 | 41.88 | |
P | 前屈:75.0 後屈:35.0 | [1] | 95.09 | 41.88 | ||
B | 左右回旋:±45.0 | [1] | 64.25 | 26.53 | ||
脚 自由度8 | 股 | H | 屈曲(前):115.0 伸展(後):35.0 | [1] | 111.4 | 42.06 |
P | 外転:90.0 内転:20.0 | [1] | 111.4 | 42.06 | ||
B | 外内回旋:±75.0 | [1] | 65.21 | 37.14 | ||
膝 | H | 伸展:2.0 屈曲:155.0 | [1] | 113.92 | 57.87 | |
B | 外旋:15.0 内旋:35.0 | 0.0度で固定 | - | - | ||
足 | H | 背屈:45.0 底屈:70.0 | [1] | 91.06 | 46.30 | |
つま先 | H | 伸展:90.0 屈曲:45.0 | 0.0度で固定 | - | - | |
PE | 外内回転:±30.0 | 0.0度で固定 | - | - | ||
[1] プロジェクト完了まで非公開
部位区分 総自由度 | 関節 | 駆動範囲 (度) | 方式 | 最終出力 | ||
T B D | T B D | |||||
第1指 | 第1 | H | 伸展:26.0 屈曲:40.0 | 0.0度で固定 | - | - |
P | 背側:20.0 掌側:20.0 | [1] | T.B.D | T.B.D | ||
第2 | P | 伸展:15.0 屈曲:65.0 | ||||
第3 | P | 伸展:20.0 屈曲:90.0 | ||||
第2指 | 第1 | H | 1指側:18.0 5指側:12.0 | 0.0度で固定 | - | - |
P | 伸展:50.0 屈曲:90.0 | [1] | T.B.D | T.B.D | ||
第2 | P | 伸展:12.0 屈曲:105.0 | ||||
第3 | P | 伸展:20.0 屈曲:90.0 | ||||
第3指 | 第1 | H | 1指側:12.0 5指側:12.0 | 0.0度で固定 | - | - |
P | 伸展:50.0 屈曲:90.0 | [1] | T.B.D | T.B.D | ||
第2 | P | 伸展:12.0 屈曲:105.0 | ||||
第3 | P | 伸展:20.0 屈曲:90.0 | ||||
第4指 | 第1 | H | 1指側:12.0 5指側:12.0 | 0.0度で固定 | - | - |
P | 伸展:50.0 屈曲:90.0 | [1] | T.B.D | T.B.D | ||
第2 | P | 伸展:12.0 屈曲:105.0 | ||||
第3 | P | 伸展:20.0 屈曲:90.0 | ||||
第5指 | 第1 | H | 1指側:12.0 5指側:18.0 | 0.0度で固定 | - | - |
P | 伸展:50.0 屈曲:90.0 | [1] | T.B.D | T.B.D | ||
第2 | P | 伸展:12.0 屈曲:105.0 | ||||
第3 | P | 伸展:20.0 屈曲:90.0 | ||||
[1] プロジェクト完了まで非公開
感覚系
項目 | 実装部位 | 方式 |
位置覚 | 各関節 | 抵抗式ポジションセンサ |
体位覚 | 骨盤 | 9軸センサ(加速度(3軸)、ジャイロ(3軸)、コンパス(3軸)) |
平衡感覚 | 頭部 | 9軸センサ(加速度(3軸)、ジャイロ(3軸)、コンパス(3軸)) |
力覚 | T.B.D(足の裏、その他) | 感圧センサ |
視覚 | 頭部 | 2眼ステレオ カメラ |
聴覚 | 頭部 | USBマイク×2 |
触覚 | T.B.D | 感圧センサ |
温覚 | T.B.D | BME280搭載 温湿度・気圧センサ 高精度IC温度センサLM61CIZ |
制御系
区分 | 対象 | 規格 | 制御・管理内容 |
統括系 | 意志 記憶 | CPU ARM 64BIT 4Core 1.4GHz 2GB LPDDR2 SDRAM 802.11.b/g/n/ac wireless LAN USB 3.0 port 1TB SSD Gigabit Ethernet | モード管理(原始のみ) 行動制御(運動系と連動) 無線通信によるリモート制御 記憶管理 |
運動統括系 | 全身 | CPU ARM 64BIT 4Core 1.4GHz 2GB LPDDR2 SDRAM 802.11.b/g/n/ac wireless LAN Gigabit Ethernet I2C Master | 姿勢制御 運動シーケンス制御 全軸位置管理 体位管理 平衡管理 衝突・接触・外力管理 温度管理 |
運動系 | 首 | CPU ARM 32BIT 1Core 1.0GHz 512MB RAM I2C Master/Slave | 独立6軸制御・状態管理 |
Motor Driver /ADC/DAC等 | |||
左腕 | CPU ARM 32BIT 1Core 1.0GHz 512MB RAM I2C Master/Slave | 独立7軸制御・状態管理 | |
Motor Driver /ADC/DAC等 | |||
左手 | CPU ARM 32BIT 1Core 1.0GHz 512MB RAM I2C Master/Slave | 3軸組み合わせ制御×5 独立15軸状態管理 | |
Motor Driver /ADC/DAC等 | |||
右腕 | 左腕と同じ | 左腕と同じ | |
右手 | 左手と同じ | 左手と同じ | |
腰・胸 | CPU ARM 32BIT 1Core 1.0GHz 512MB RAM I2C Master/Slave | 独立5軸制御・状態管理 体位状態管理 | |
Motor Driver /ADC/DAC等 | |||
左脚 | CPU ARM 32BIT 1Core 1.0GHz 512MB RAM I2C Master/Slave | 独立5軸制御・状態管理 接地状況管理 | |
Motor Driver /ADC/DAC等 | |||
右脚 | CPU ARM 32BIT 1Core 1.0GHz 512MB RAM I2C Master/Slave | 独立5軸制御・状態管理 接地状況管理 | |
Motor Driver /ADC/DAC等 |
デバッグ・モニター系
区分 | 方式 | 機能 |
統括系 | wireless LAN出力 | モード情報出力 行動制御情報出力 |
運動系 | wireless LAN出力 | 姿勢制御情報出力 運動シーケンス制御情報出力 全軸位置情報出力 全動力状態情報出力 体位情報出力 平衡情報出力 衝突・接触・外力情報出力 温度情報出力 その他ログ情報出力 |