You are here:
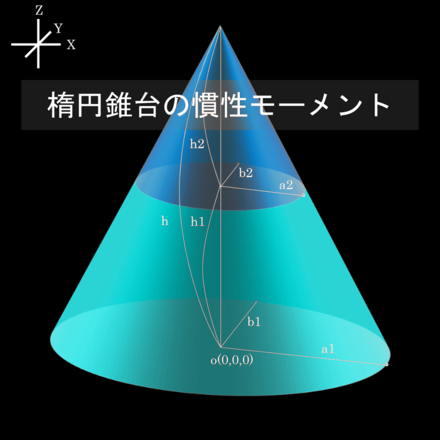
楕円錐台の慣性モーメントの算出方法を纏めた資料を掲載しました。
三角錐の慣性モーメントの算出方法を纏めた資料を掲載しました。
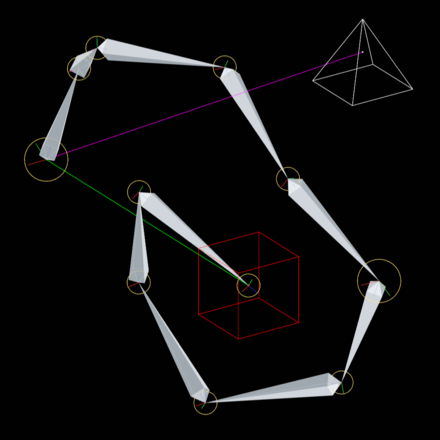
手の仕組みについて考察し、ロボットの手の設計の指針を纏めた資料を掲載しました。
順/逆運動学演算プログラムのサンプル ソース コード(C++言語)を掲載しました。
オイラーの運動方程式について纏めた資料を掲載しました。
運動制御原始モジュール IK演算部 開発計画書を公開しました。
運動制御原始モジュール開発計画書を公開しました。
発案の経緯からロードマップまで、リアルノイド オリジンのご紹介を兼ねて企画書を公開しました。